Arbeitsthemen in der AG Schreyer

Direktlinks: Einleitung | Themenübersicht
|
|
|
|
Arbeitsthemen in der AG Schreyer |
|
|
|
|
|
Direktlinks: Einleitung | Themenübersicht |
|
Der allgemeine Plattform-Roboter kann bei vorgegebener Beimlänge auf maximal 40 verschiedene Arten montiert werden. Die Stewart-Gough-Plattform ist trotz fester Beinlänge beweglich:
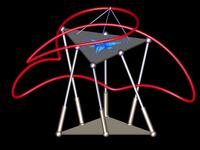
Animationen einer exzeptionellen Stewart-Gough Plattform mit Koppler-Kurven vom Grad 12 und Geschlecht 7 finden sie hier oder hier.
Eine Publikation zu diesem Thema: Geiß Florian, Schreyer Frank-Olaf, A family of exceptional Stewart-Gough mechanisms of genus 7, Interactions of classical and numerical algebraic geometry, 221-234, Contemp. Math. 496, Amer. Math. Soc., Providence, RI, 2009
Gibt es andere bewegliche Plattform-Mechanismen?
Direktlinks: Einleitung | Themenübersicht